基于Ubuntu安装ROS 系统(melodic版本)
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。
Ubuntu系统版本18.04 版本
ROS 版本为Melodic版本
配置Ubuntu的repository源,编辑/etc/apt/sources.list文件。
1 2 3 4 5 6 7 8 9 10 11 12 13 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
更新源以及更新系统
1 2 sudo apt-get update -y sudo apt-get upgrade -y
配置ROS的Ubuntu源,
1 2 3 4 5 6 7 8 9 10 ROS 镜像使用帮助 新建 /etc/apt/sources.list.d/ros-latest.list,内容为: 你的Debian/Ubuntu版本: Ubuntu 18.04 LTS deb https://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ bionic main 然后再输入如下命令,信任ROS的GPG Key,并更新索引: sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt update
开始安装ROS系统
1 sudo apt install ros-melodic-desktop-full -y
ROS环境变量设置
1 2 echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc
安装构建包依赖
1 sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
初始化rosdep工具,在使用许多ROS工具之前,您需要初始化rosdep。rosdep使您能够轻松地为要编译的源安装系统依赖性,并且是运行ROS中某些核心组件所必需的。
1 2 3 sudo apt install python-rosdep sudo rosdep init rosdep update
验证当前安装环境是否正确。
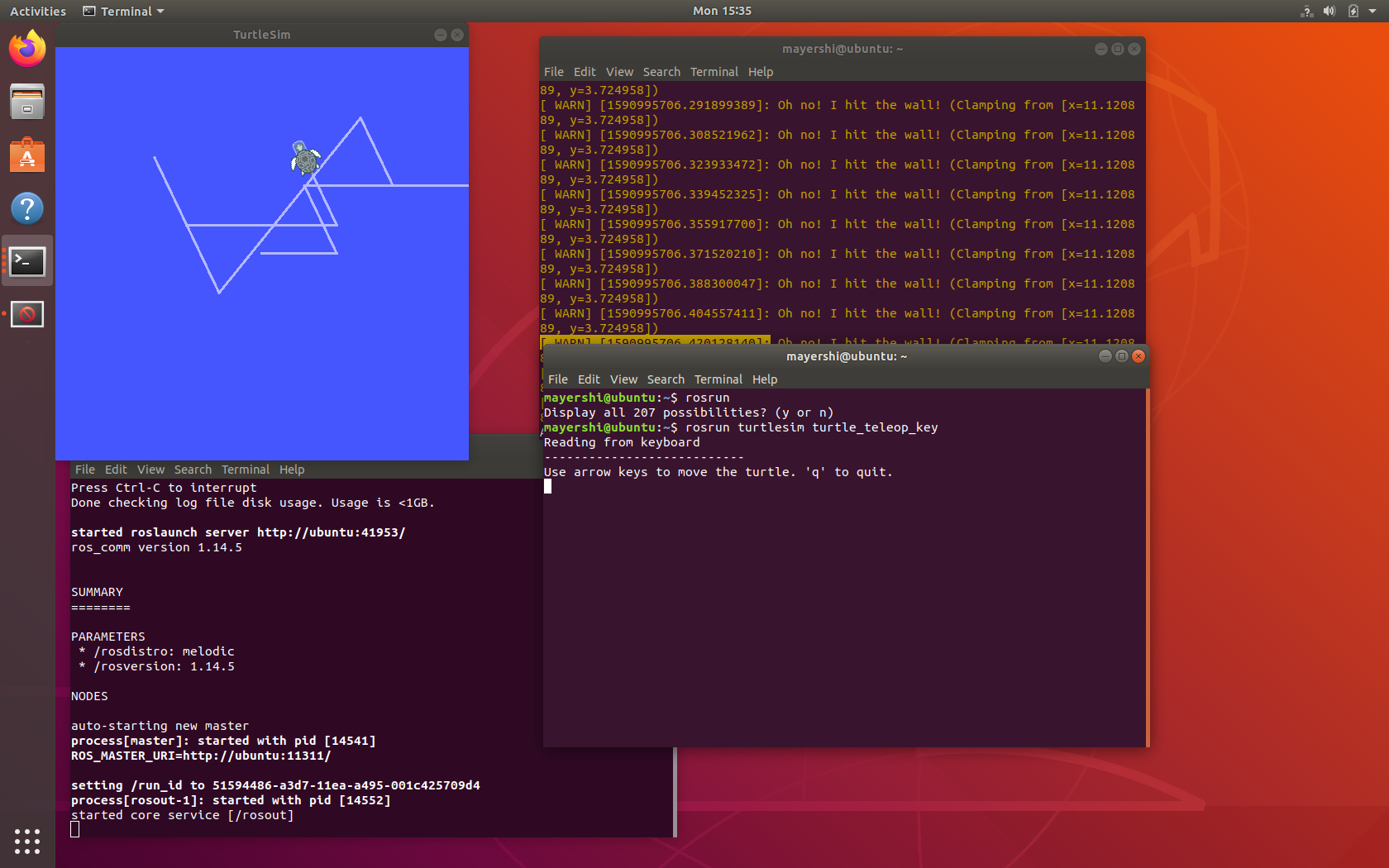
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 ros@ubuntu:~$ roscore ... logging to /home/mayershi/.ros/log /51594486-a3d7-11ea-a495-001c425709d4/roslaunch-ubuntu-14528.log Checking log directory for disk usage. This may take a while . Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://ubuntu:41953/ ros_comm version 1.14.5 SUMMARY ======== PARAMETERS * /rosdistro: melodic * /rosversion: 1.14.5 NODES auto-starting new master process[master]: started with pid [14541] ROS_MASTER_URI=http://ubuntu:11311/ setting /run_id to 51594486-a3d7-11ea-a495-001c425709d4 process[rosout-1]: started with pid [14552] started core service [/rosout] ros@ubuntu:~$ rosrun turtlesim turtlesim_node ros@ubuntu:~$ rosrun turtlesim turtle_teleop_key
效果如图: